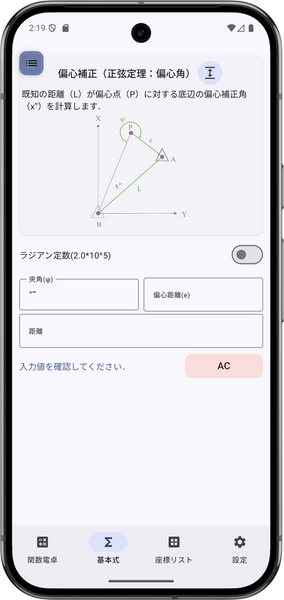
偏心補正
(正弦定理:偏心角・水平角、余弦定理:偏心角・水平角)
偏心補正は、障害物(樹木、フェンス、建物の角など)により、真の測点(境界点など)に直接プリズムを設置できない、あるいは見通しが効かない場合に不可欠な手法です。
真の測点の近傍に観測可能な「偏心点」を設け、そこでの観測結果と偏心点〜真の測点間の幾何学的関係(偏心要素)を用いて、真の測点の座標や方向角・距離を間接的に算出(帰心計算)します。
ラジアン定数(2.0*10^5)に固定して計算することもできます。
1. 計算条件
偏心計算を成立させるためには、次の要素が観測または計測されている必要があります。
観測要素:
-
機械点から偏心点までの観測距離(L')と観測方向角。
偏心要素:
-
偏心点から真の測点までの偏心距離(e)
-
偏心角(α)
-
偏心角は、機械点方向を0度としたときの真の測点方向への角度(またはその逆)として定義されます。
2. 基本計算式
機械点(B)、真の測点(A)、偏心点(e)からなる三角形をベースに解説します。
-
L:真の距離(B から A までの距離)
-
L':観測距離(B から e までの距離)
-
e:偏心距離(A と e の間の距離)
-
α:偏心角(偏心点 e における、機械点 B と真の測点 A のなす角)
-
x:補正角(機械点 B における、真の測点 A と偏心点 e の方向角の差
①真の距離の算出(余弦定理の適用):
-
L = SQRT(L'^2 + e^2 - 2L'e cos α)
②補正角の算出(正弦定理の適用):
-
x = arcsin(e・sin α / L )
③真の方向角の決定:
-
観測方向角に対し、偏心が左側か右側かに応じて補正角 x を加減算し、真の方向角を決定します。
2. 実務上のポイント
誤差の最小化(距離の制約):
-
偏心距離 e は、観測距離 L' に対して十分に短く取る必要があります。
-
一般的に、e が L' の数パーセント以内に収まるよう計画することで、角度観測の誤差が結果に与える影響を抑制できます。
偏心角の配置:
-
距離の精度を優先する場合は偏心角 α を0度または180度近く(視準線上に配置)に角度の精度を優先する場合は90度または270度近くに設定するなど、目的に応じた偏心点の選定が求められます。
左右の取り違え防止:
-
現場での最大のヒューマンエラーは「偏心が観測線に対して右か左か」の記録ミスです。
-
野帳(手簿)への略図記入を徹底し、計算機やアプリへ入力する際の符号(プラス・マイナス)の整合性を必ず確認します。
正弦定理:偏心角

偏心点における角度(α)と、それに対する辺(真の距離 L )、および補正角(x)と偏心距離(e)の関係を示します。主に、真の距離 L が既知、または概算できる場合に、補正角 x を求めるための基礎となります。
-
L / sin α = e / sin x
正弦定理:水平角

機械点における補正角(x)を直接求めるための変形です。観測から真の方向角を決定する際に最も頻繁に用いられるアプローチです。
-
sin x = e・sin α / L
余弦定理:偏心角

偏心点における角度(α)を挟む2辺(観測距離 L' と偏心距離 e)から、対辺である「真の距離 L」を算出します。実務において最も利用頻度が高い基本式です。
-
L^2 = L'^2 + e^2 - 2L'e cos α
-
L = SQRT(L'^2 + e^2 -L'e cos α)
余弦定理:水平角

機械点における補正角(x)を挟む2辺(真の距離 L と観測距離 L')から、偏心距離 e の関係性を表します。逆算的に誤差の検証を行う場合や、機械点での角度に基づく解析に用います。
-
e^2 = L^2 + L'^2 - 2LL' cos x